The Basic Structure of Machine Vision Applications - Introduction
Published on April 14, 2008 by TIS Marketing.
Please Note: This blog post is part of a series of four posts altogether. The posts include: Intro, Part 1, Part 2 and Part 3.
Authors
-
Sebastian Bollhorst: General Manager of The Imaging Source Taiwan Branch Office. He holds a B.S. degree in International Business and Economics from the University of North Carolina at Charlotte, USA.
-
TIS Marketing: Senior System Specialist at The Imaging Source Europe GmbH. He holds an M.S. degree in Electrical Engineering from University of Bremen, Germany, and a B.S. degree in Electrical Engineering from Beijing University of Aeronautics and Astronautics, China.
Introduction
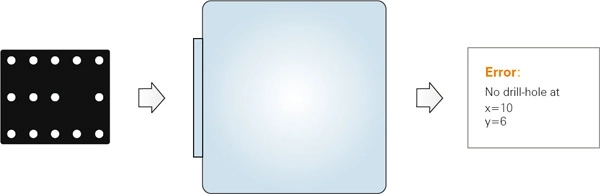
I am looking for a camera which rejects parts with incorrect drillholes.
Everyday, we receive such inquiries. Often prospective customers are surprised when we answer:
Sorry, but cameras can't do that.
This article will show why a complete machine vision system is required to solve the above mentioned problem and which part of the work is allocated to the camera. The article mainly address system engineers who are about to take first steps in the world of machine vision.
Overview
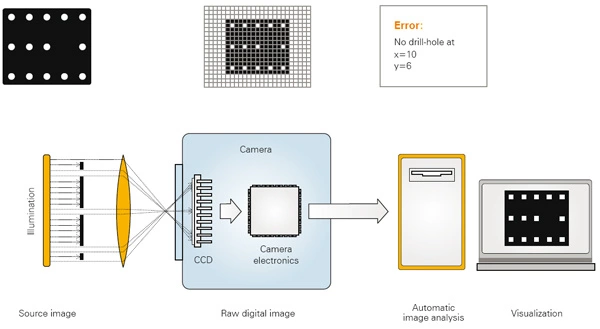
A machine vision system consists of 5 basic components: illumination, optics, camera, computer and software. At first glance, the camera is the source of the image. But actually, the image is created by the illumination. The CCD chip transforms the photons encountering it into an electrical signal. The camera electronics digitizes this electrical signal and make it available as a "Raw digital image". The computer - or rather the software it runs - uses this raw digital image for two basic tasks: Visualization and/or automatic image analysis. Automatic image analysis is, however, only reliable in the case of controlled illumination and simple objects. In the context of visualization, the illumination's influence on the resulting image should not be underestimated.